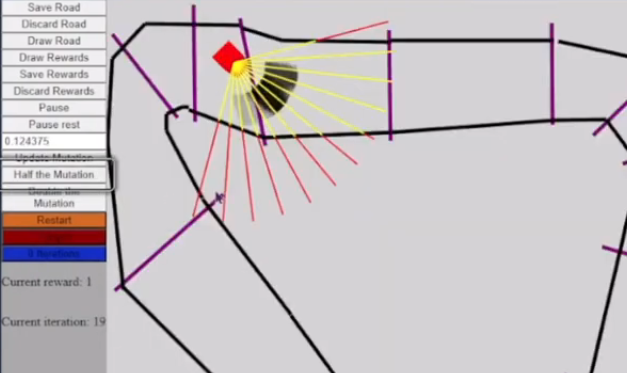
A population of cars, each controlled by a randomly initialized neural network, is spawned onto a track. Cars that travel further before crashing are considered more fit. After each generation, the best performers are selected to reproduce, passing on their network weights with slight mutations. Over many generations, the networks evolve to steer effectively without any explicit programming of driving rules.
The Goal
Autonomous vehicles with near-instant reaction times and perfect adherence to traffic logic could fundamentally reshape road infrastructure. Narrower lanes, tighter intersections, and higher speed limits become viable when human error is removed from the equation, dramatically increasing road throughput without physical expansion.
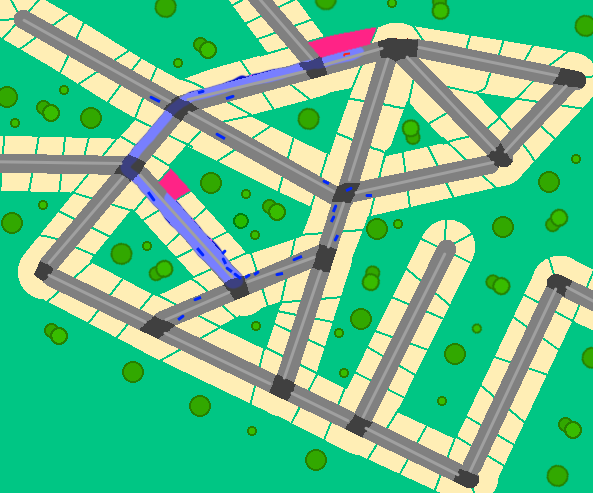
This simulation explores that premise at a basic level. By observing how evolved neural networks handle curves and obstacles compared to unpredictable human inputs, we gain insight into the efficiency gains possible when vehicles communicate and react as a coordinated system rather than isolated, fallible drivers.
SFML Physics Engine
A C++ simulation demonstrating neuroevolution, where neural networks learn to navigate roads through generational selection.